LE BAC SSI ( S option Sciences de l'Ingénieur )
Quelque soient les Enseignements d'Exploration choisis en Seconde, les élèves ont la possibilités de choisir un bac S scientifique option SI ( Sciences de l'Ingénieur ).
Les programmes de Maths et de Physique sont identiques à ceux d'un bac S option SVT ( Science et Vie de la Terre ).
La SVT y est remplacé par un bloc de 8h de SI à fort coefficient.
L'enseignement de SI s'articule autour de la démarche complète d'engineering, c'est à dire une démarche partant du Cahier des Charges d'un produit en passant par la modélisation puis l'expérimentation.
Cet aspect de modélisation est maintenant incontournable, quelque soit le domaine d'étude choisi après le bac.
Le tableau ci-dessous illustre l'intérêt de choisir SI dès la première dans une optique de choisir une Classe Préparatoire aux Grandes Ecoles d'ingénieur (CPGE) :
Cliquez ici pour modifier.
On y voit que pour 3 types de classes prépa sur 4 ( MP : Math Physique - PC : Physique Chimie - PT : Physique Technologie ), les Sciences de l'Ingénieur sont présentes dès la première année.
C'est dire l'importance de la filière dans les études supérieures.
Pour préparer efficacement l'entrée dans la majorité des Classes Préparatoires, il est donc judicieux de pratiquer la discipline dès la Première, à défaut de ne pas l'avoir prise dès la Seconde.
Le lien suivant renvoie sur un site de classement des écoles d'ingénieurs françaises montrant le salaire à la sortie de l'école, le temps mis pour trouver un emploi...
http://www.usinenouvelle.com/comparatif-des-ecoles-d-ingenieurs-2015
QUE FAIT ON EN PREMIERE ET TERMINALE SSI ?
La formation permet s'articule autour de 3 axes :
Le premier axe de formation consiste à comparer les performances expérimentales avec celles annoncées par le constructeur.
Exemple ci-après sur un ROBOT HAPTIQUE :

Ce robot est utilisé pour reproduire les sensations du toucher ( grâce à un effecteur que l'on saisit à la main ) à partir d'un environnement virtuel. Les applications sont multiples ( télémanipulation, jeux vidéos, domaine militaire....).
Pour assurer un bon rendu haptique, l'effecteur doit fournir un certain effort annoncé par le fabricant.
Le but du TP est de mesurer expérimentalement cet effort et de le comparer ensuite à la valeur annoncée.
TOUT SE FAIT EN SEANCE DE TRAVAUX PRATIQUES

Ci-contre un autre exemple d'étude conduite lors d'une séance de TRAVAUX PRATIQUES sur la motorisation du SCOOTER ELECTRIQUE PEUGEOT .
A partir de la maquette réelle en fonctionnement, on réalise des relevés expérimentaux sur :- les vitesses de rotation sur le moteur, l'axe intermédiaire et la roue du scooter.
- les caractéristiques ( courant et couple ) du moteur à vide et en charge
On compare ensuite ces résultats avec les performances du constructeur PEUGEOT; par exemple le scooter est censé pouvoir démarrer sur une pente maximale de 17% avec une personne de 90 kg.
On valide ou on invalide les performances annoncées !
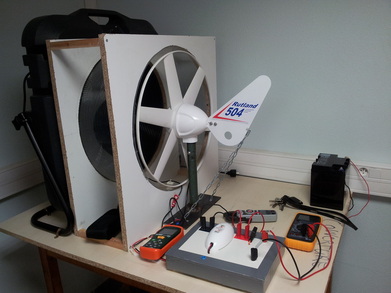
Autre exemple ci-contre : un BANC DE TEST EOLIEN permettant d'analyser et de comprendre la conversion de l'énergie éolienne en énergie électrique, la régulation de cette énergie via un régulateur et le stockage dans une batterie.
On effectue des mesures expérimentales du courant généré en fonction de la vitesse du vent ( simulé par ventilation ).
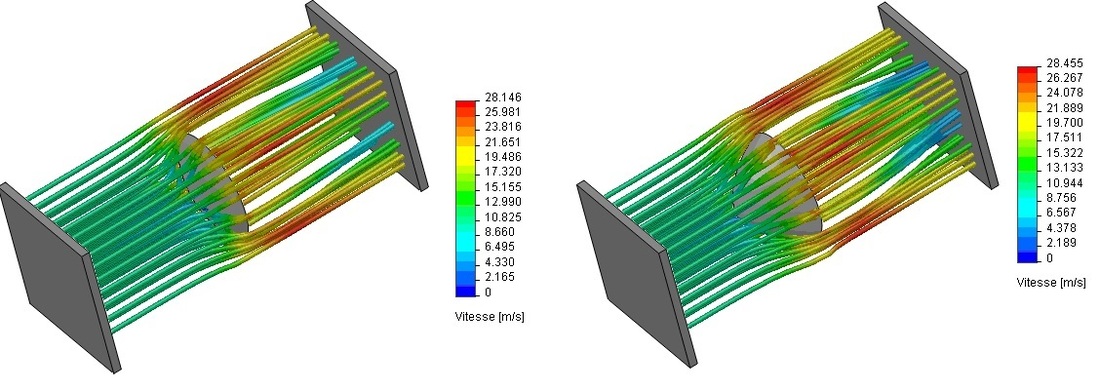
On calcule ensuite les temps de charges, on étudie la possibilité d'y adjoindre un panneau solaire, et on étudie le profil du nez de l'hélice par une simulation logicielle de mécanique des fluides permettant d'optimiser l'écoulement de l'air autour de l'éolienne ( photos ci-dessous )
De nombreux autres supports sont utilisés, comme le GYROPODE EWEE , un robot de transport personnel ( voir vidéo ci-dessous avec des essais réalisés sur la piste d'athlétisme du lyçée ! ). Vérification de l'autonomie, du rayon de braquage....
Le second axe de formation consiste à élaborer un modèle ( numérique, programme.. ) d'un produit ou d'un prototype de produit, puis à valider ce modèle à l'aide d'essais expérimentaux.
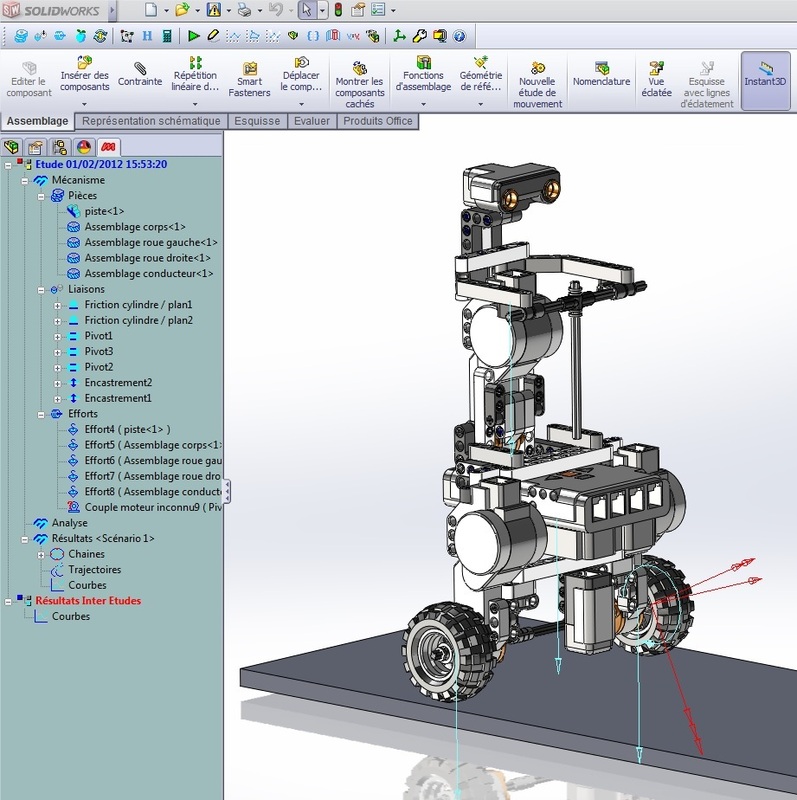
Exemple ci-dessous : Le robot de transport monopersonnel urbain modélisé à partir des lego MINDSTORMS (marque segway ou ewee )..
Le Cahier des Charges est le suivant :
Le robot doit être capable de rester en équilibre sur 2 roues seulement, d'avancer s'il se penche vers l'avant, de reculer s'il se penche vers l'arrière.
La phase de modélisation sur logiciel 3D permet d'étudier le comportement mécanique du robot afin de cerner les paramètres influents.
On réalise ensuite la programmation sur logiciel à l'aide des paramètres précédents et d'autres modèles de comportement utilisés en robotique ( asservissement, correction PID ( Proportionnel Intégral Dérivé ) ... )
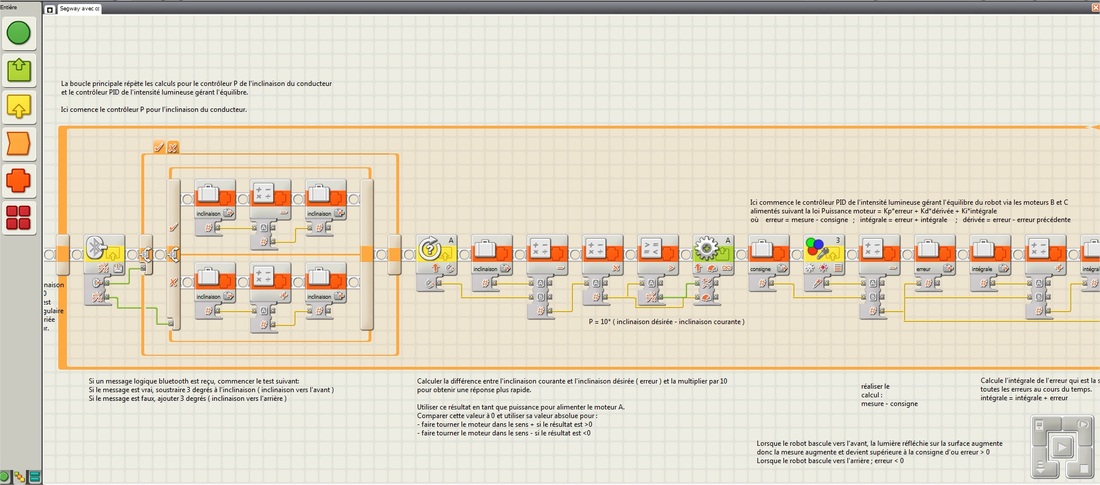
On passe ensuite à la phase expérimentale pour vérifier si le comportement attendu dans le Cahier des Charges est bien conforme.
L'inclinaison du robot s'effectuera à l'aide d'un boîtier programmable faisant office de télécommande :
Le troisième axe de formation consiste à créer ou utiliser un modèle existant pour prévoir les performances d'un produit.
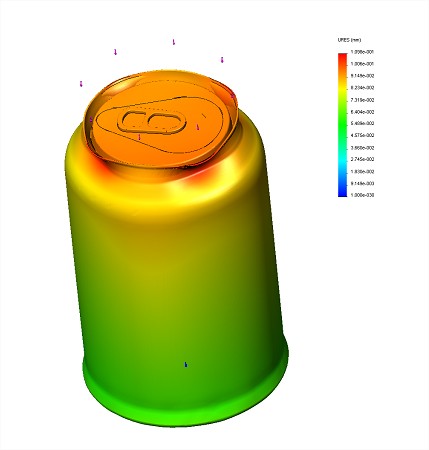
Exemple ci-dessous mondialement connu : la canette de soda 33 cl.
Le cahier des charges constructeur stipule 2 conditions à respecter :
- Condition 1 : La canette doit résister à la pression interne du liquide de 7 bars.
- Condition 2 : La canette pleine doit résister à une masse verticale de 100 kg.
On utilise un modèle numérique de la canette sur logiciel 3D permettant de déterminer les contraintes, déformations de la canette et ainsi de vérifier les 2 critères imposés.
La première image ci-dessous montre la canette avant déformation et la seconde après déformation due à la pression interne du liquide et la masse verticale de 100 kg.

De nombreux logiciels de simulation sont utilisés, par exemple ci-dessous, le logiciel Sinusphy ( multi physique ) permet de modéliser toute la chaîne fonctionnelle du DRONE PARROT ( gyrocoptère à 4 hélices ) de la commande jusqu'aux hélices.
On peut ainsi vérifier les données constructeur ( vitesse hélice = 28000 tr/min !! ), analyser toutes les grandeurs électroniques et mécaniques puis simuler le pilotage du DRONE, comme sur smartphone ou tablette, en agissant sur le l'ALTITUDE, le TANGAGE, le ROULIS et le LACET.
On peut ainsi vérifier les données constructeur ( vitesse hélice = 28000 tr/min !! ), analyser toutes les grandeurs électroniques et mécaniques puis simuler le pilotage du DRONE, comme sur smartphone ou tablette, en agissant sur le l'ALTITUDE, le TANGAGE, le ROULIS et le LACET.
Autre exemple : modélisation sous logiciel multiphysique Matlab d'une cabine d'ascenceur d'hôpital permettant de prévoir les performances de récupération énergétiques ( il est en effet possible de produire du courant et de le réinjecter dans le réseau électrique lors des phases de freinage de la cabine ).
La vidéo ci-dessous montre le modèle simulé, on voit à la fin une figure 3D issue de 220 simulations compilées montrant le pourcentage d'énergie économisée en fonctions du pourcentage de chargement de la cabine et du nombre d'étages :
La vidéo ci-dessous montre le modèle simulé, on voit à la fin une figure 3D issue de 220 simulations compilées montrant le pourcentage d'énergie économisée en fonctions du pourcentage de chargement de la cabine et du nombre d'étages :
LES PROJETS EN PREMIERE ET TERMINALE SSI.
Les PROJETS PLURITECHNOLOGIQUES sont effectués par les élèves en Première ET en Terminale.
Sur des thèmes comme "L'homme et l'environnement, le transport, l'énergie, la matière, la forme...", les groupes de projets travaillent à la conception et à la réalisation de produits centrés autour de problématiques modernes et/ou originales.
Les projets sont basés sur la méthode "model based design", c'est à dire la conception par la modélisation dont le but est de diminuer les coûts.
D'ailleurs, le Lyçée Costebelle participe depuis l'année scolaire 2013 aux Olympiades de Sciences de l'Ingénieur et à remporté 2 finales académiques à Cannes et donc participé à 2 finales nationales à Paris.
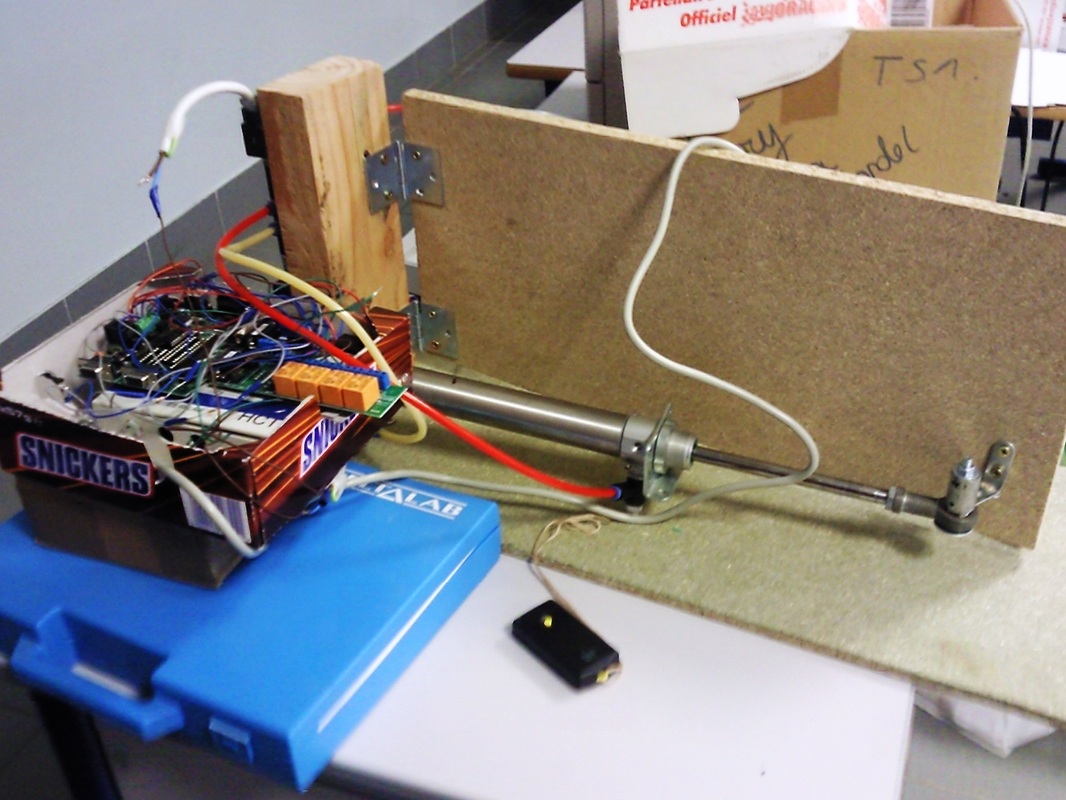
Les projets qualifiés : un dispositif permettant d'imposer une inclinaison souhaitée ( gîte ) sur un voilier quelque soit l'intensité du vent et de la houle :
Sur des thèmes comme "L'homme et l'environnement, le transport, l'énergie, la matière, la forme...", les groupes de projets travaillent à la conception et à la réalisation de produits centrés autour de problématiques modernes et/ou originales.
Les projets sont basés sur la méthode "model based design", c'est à dire la conception par la modélisation dont le but est de diminuer les coûts.
D'ailleurs, le Lyçée Costebelle participe depuis l'année scolaire 2013 aux Olympiades de Sciences de l'Ingénieur et à remporté 2 finales académiques à Cannes et donc participé à 2 finales nationales à Paris.
Les projets qualifiés : un dispositif permettant d'imposer une inclinaison souhaitée ( gîte ) sur un voilier quelque soit l'intensité du vent et de la houle :
Ensuite, un exosquelette permettant de reproduire les mouvements d'un bras ( doigts, poignet, coude....). Ce projet ayant nécessité un très gros travail de la part des élèves dépassant largement les 70h prévues.
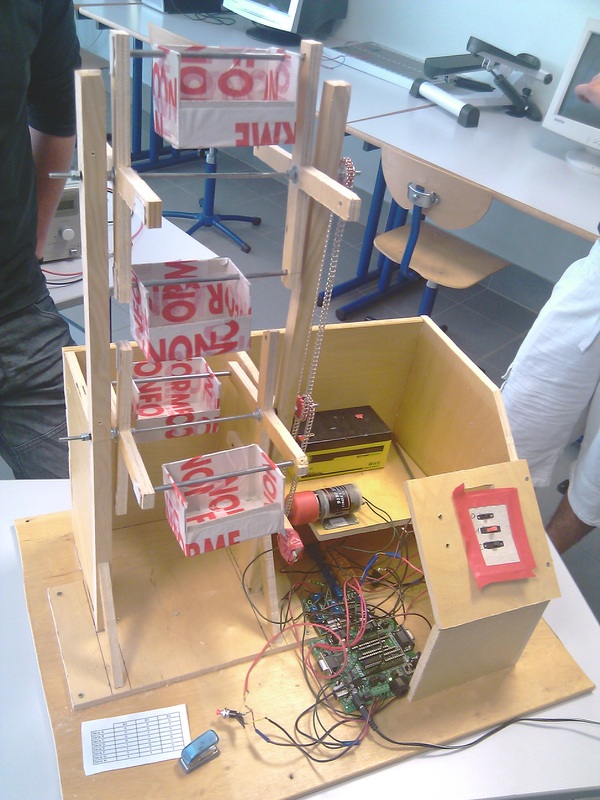
Viennent ensuite les projets dont les élèves n'ont pas participé aux olympiades, un projet tiré d'un produit existant mais trop peu répandu, la MAISON DOME suivant la course du soleil afin d'optimiser la gestion de l'énergie à l'intérieur du bâti ( éclairage, chauffage...).
La vidéo ci-dessous présente une maquette simplifiée réalisée par des élèves de Première SI :
...et puis ci-dessous, une version plus aboutie réalisée par des élèves de Terminale SI.
Exemple suivant : une Harpe Laser dont chaque faisceau ( auquel est attribué une note ) se coupe avec les mains.
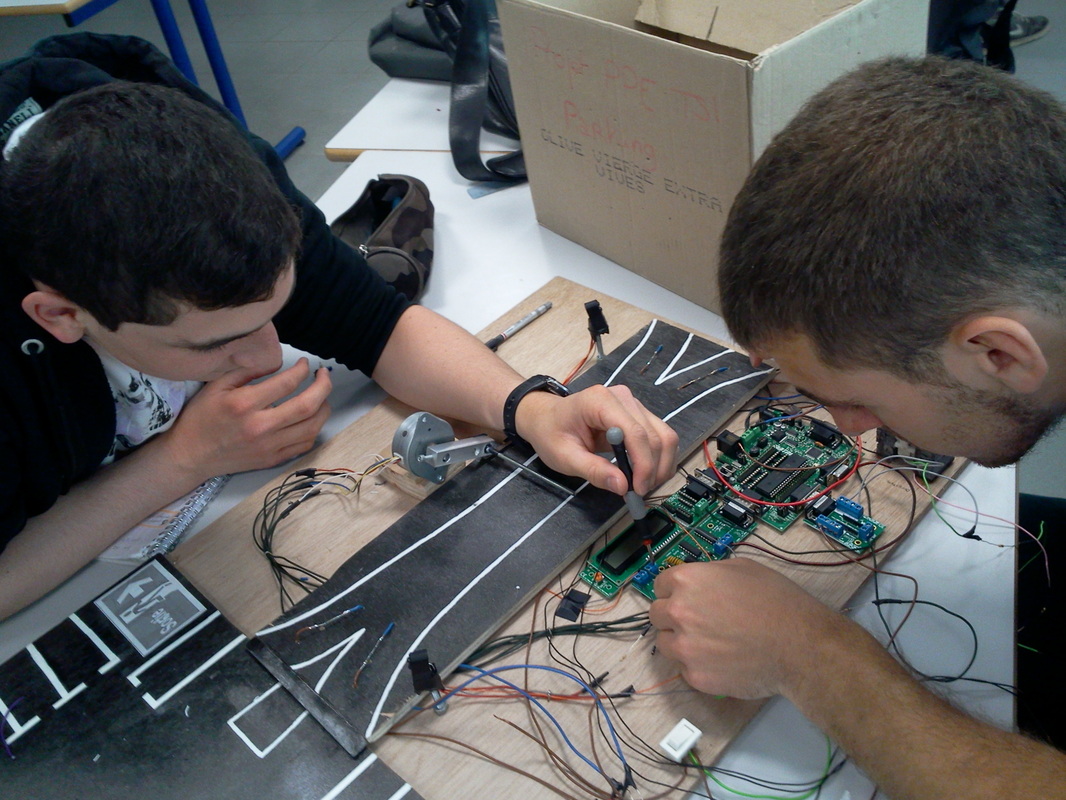
Exemple ci-dessous : un véhicule suiveur, prototype robotisé consistant à fluidifier la circulation dans les agglomérations en remplaçant l'homme par une conduite assistée.
Le véhicule de tête est télécommandé pour l'expérimentation, le robot suiveur assemblé et programmé par les élèves.
Le véhicule de tête est télécommandé pour l'expérimentation, le robot suiveur assemblé et programmé par les élèves.
Autre exemple : un robot à commande vocale dotée d'une carte de gestion Rasberry Pi, d'un serveur web apache permettant l'interprétation et l'exécution de HTML, CSS, JavaScript et PHP. Les élèves, passionnés, se sont entièrement chargés de la programmation et de la mise en place du serveur.
Seul souci sur la vidéo : la latence entre les ordres vocaux envoyés et leur exécution.
On peut citer d'autres projets réalisés par les élèves :
- le robot patrouilleur destiné à alerter les voisins en cas d'intrusion illicite dans une maison.
- le robot de rayonnage permettant de ramener les produits dans les rayons de grande surface sur le devant des étagères.
- le portail automatisé permettant de contrôler l'accés d'une résidence.
- le robot patrouilleur destiné à alerter les voisins en cas d'intrusion illicite dans une maison.
- le robot de rayonnage permettant de ramener les produits dans les rayons de grande surface sur le devant des étagères.
- le portail automatisé permettant de contrôler l'accés d'une résidence.

|

|
|
- le panneau solaire automatisé suivant la trajectoire du soleil.
- le lave vitres automatisé permettant de remplacer l'homme pour le nettoyage de grands immeubles.
- le système de rangements par casiers gérés electroniquement afin d'optimiser la place disponible dans les magasins de stocks, les bibliothèques, les commerces...

|

|
|
- le système de gestion de places de parking à une seule voie d'accés pour l'entrée et la sortie de véhicules.
- le mécanisme de comptage d'élèves pour établissement scolaire.
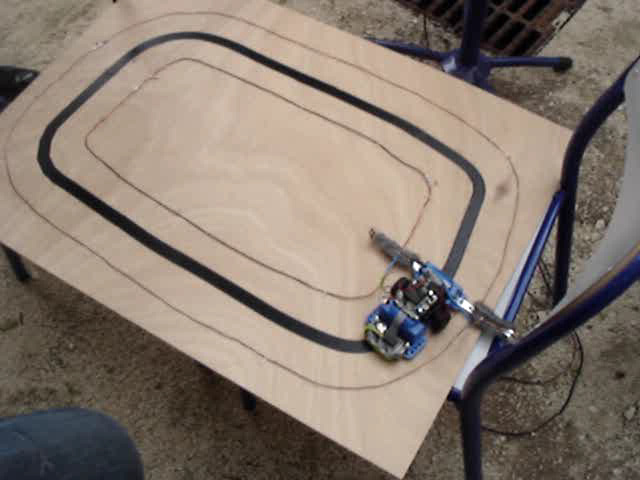
- le robot suiveur de lignes destiné à remplacer l'homme pour des opérations dangeureuses de maintenance ou de repérage sur autoroutes par exemple.
|

|
|
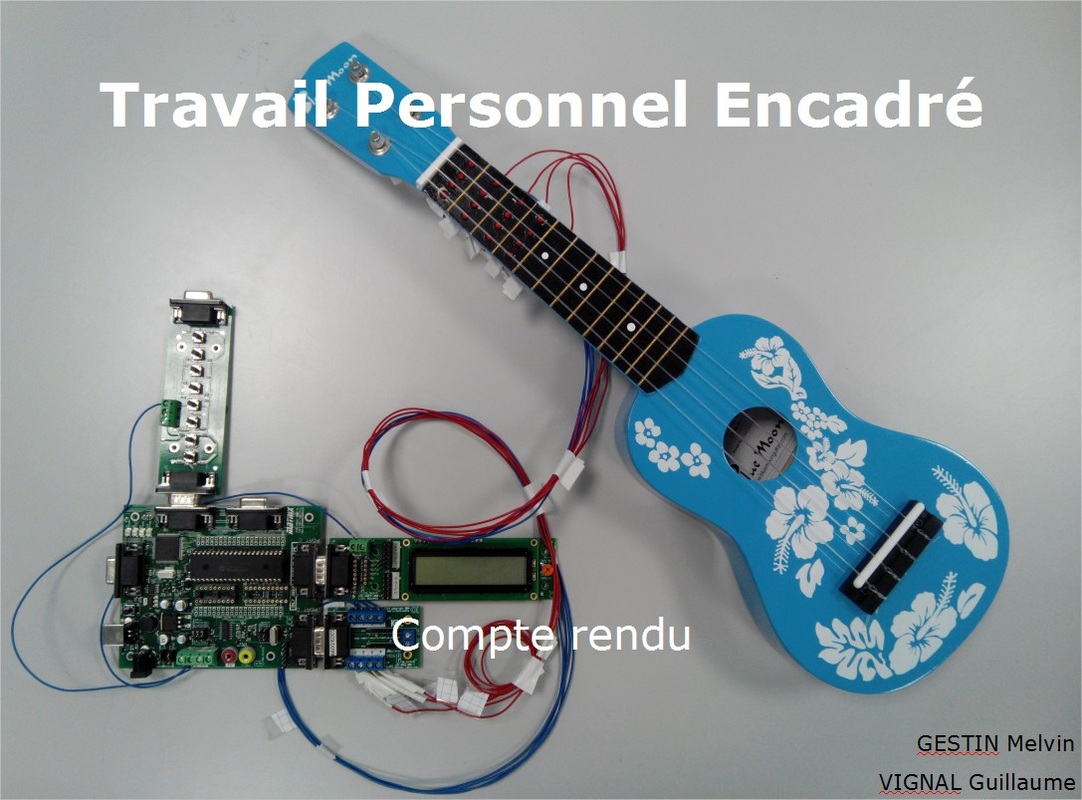
- le dispositif d'apprentissage facilité d'un instrument de musique.
Il utilise un Ukulélé et une carte de gestion munie d'une matrice à LED disposée sur le manche.
Les Leds s'allument en fonction de la note à jouer.
Bien d'autres projets sont réalisés dans de nombreux domaines, citons :
- le découpe légumes automatisé pour faciliter les travaux en cuisine.
- la poubelle à ouverture par cellule infrarouge.
- la table à rallonges motorisées.
- le tourneur de pages automatisé pour assister les handicapés lors de leur lecture.
- le distributeur de croquettes automatisé pour animaux domestiques.
- l' écraseur de canettes pour faciliter le recyclage
- le chauffeur d'eau à énergie solaire pour piscines, douches extérieures...
- et bien d'autres encore....
Tous ces projets sont des idées originales et parfois novatrices de nos élèves, nous leur permettons de les réaliser..!!
Remerciements aux élèves des Sciences de l'Ingénieur qui ont contribué à la création de ce site !
